هندسة الميكاترونكس والروبوتات هي مجال متعدد التخصصات يجمع بين الهندسة الميكانيكية، والهندسة الكهربائية، وهندسة التحكم، وعلوم الكمبيوتر لتطوير وتصميم أنظمة متكاملة. مع التقدم السريع في التكنولوجيا، أصبحت هذه الهندسة ضرورية لتطوير أنظمة أوتوماتيكية ذكية تستطيع العمل بشكل مستقل أو شبه مستقل في مجموعة واسعة من التطبيقات الصناعية والتجارية والطبية والبحثية. ومع ذلك، فإن هذا التخصص يأتي مع مجموعة من التحديات والمشاكل التي تواجه المهندسين والمطورين في هذا المجال. هذا المقال سوف يناقش هذه المشاكل بشكل موسع ويقدم الحلول الممكنة للتعامل معها.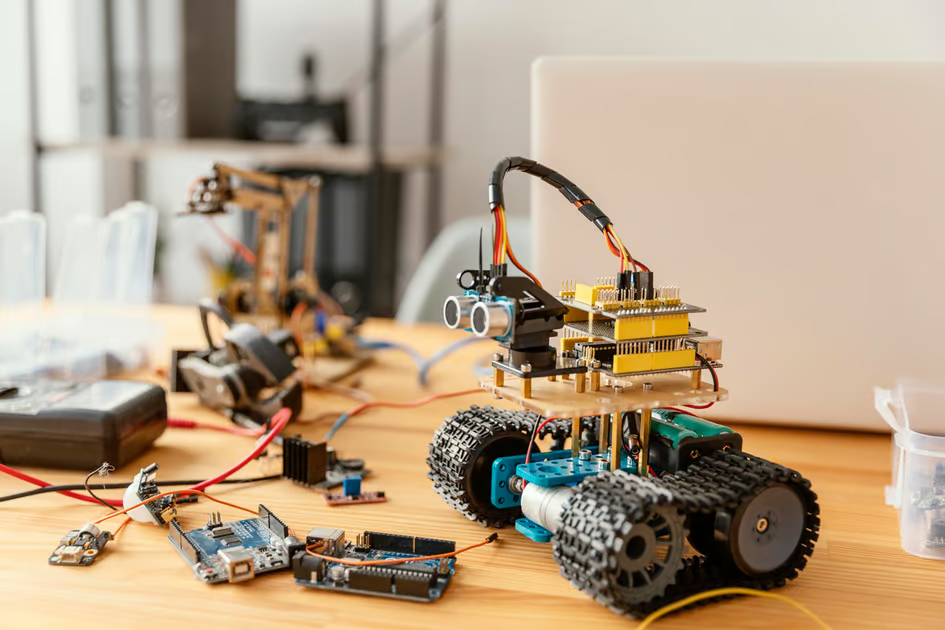
1. التكامل بين التخصصات المختلفة
المشكلة
الميكاترونكس هو مجال يجمع بين عدة تخصصات تشمل الميكانيكا، الكهرباء، التحكم، والبرمجيات. هذا يجعل من الصعب على المهندسين الجمع بين هذه التخصصات المختلفة في مشروع واحد، حيث قد يكون لكل تخصص متطلباته الخاصة وطريقة تفكيره المختلفة. على سبيل المثال، يمكن أن تكون هناك صعوبات في التواصل بين فرق البرمجة وفرق الهندسة الميكانيكية بسبب الفهم المختلف لكل منهما حول كيفية عمل النظام ككل.




الحلول الممكنة
- التدريب المتخصص: يجب على المهندسين العمل على توسيع معرفتهم في التخصصات الأخرى. توفير دورات تدريبية متقدمة تساعد المهندسين على فهم الأساسيات والمبادئ العامة للتخصصات الأخرى.
- أدوات التعاون: استخدام برامج وأدوات تصميم تساعد على التكامل بين الفرق المختلفة، مثل البرمجيات التي تمكن من محاكاة النظام الميكانيكي والكهربائي معًا، بالإضافة إلى دمج البرمجة والتحكم.
- إدارة المشاريع متعددة التخصصات: توظيف مديرين للمشاريع لديهم خبرة في التعامل مع فرق متعددة التخصصات، والذين يمكنهم تسهيل التواصل بين هذه الفرق المختلفة لضمان التكامل السلس للمكونات المختلفة.
2. تعقيدات تصميم الأنظمة والتحكم
المشكلة
تتطلب أنظمة الميكاترونكس الحديثة تصميم أنظمة معقدة تشمل العديد من المكونات المختلفة مثل المحركات، المستشعرات، وأنظمة التحكم. هذا التعقيد يجعل من الصعب أحيانًا التنبؤ بكيفية تفاعل هذه المكونات معًا عند تشغيل النظام بشكل كامل. بالإضافة إلى ذلك، قد يكون من الصعب تطوير أنظمة تحكم دقيقة وثابتة بسبب التفاعل الديناميكي بين المكونات المختلفة.
الحلول الممكنة
- استخدام نماذج المحاكاة: قبل بناء النظام الفعلي، يمكن استخدام برامج المحاكاة لنمذجة وتحليل تفاعل المكونات المختلفة. يساعد هذا في الكشف عن أي مشاكل محتملة في مرحلة التصميم قبل الانتقال إلى مرحلة التنفيذ.
- التصميم التكراري: تبني نهج التصميم التكراري الذي يسمح بإجراء التعديلات المستمرة على النظام بناءً على الاختبارات العملية وردود الفعل من النموذج الأولي.
- التحكم المتقدم: استخدام تقنيات التحكم المتقدمة مثل التحكم التكيفي والتحكم بالمنطق الضبابي (Fuzzy Logic) التي تمكن الأنظمة من التعامل مع عدم اليقين والتعقيدات الديناميكية في النظام.
3. الاستقرار والموثوقية في الأنظمة الروبوتية
المشكلة
الروبوتات تتعامل مع بيئات غير مستقرة أحيانًا، مما يؤدي إلى مشاكل في الاستقرار والموثوقية. على سبيل المثال، الروبوتات المستخدمة في العمليات الجراحية تحتاج إلى دقة عالية جدًا. أي خلل صغير في النظام يمكن أن يؤدي إلى نتائج كارثية. كذلك، الروبوتات الصناعية التي تعمل في بيئات قاسية تحتاج إلى صيانة دورية لضمان موثوقيتها.
الحلول الممكنة
- اختبار المكثف: يجب إجراء اختبارات مكثفة في بيئات محاكاة واقعية قبل إطلاق الروبوت للاستخدام الفعلي. يمكن أن تتضمن هذه الاختبارات سيناريوهات واقعية لتقييم أداء النظام في ظروف مختلفة.
- تصميم redundancies: تصميم النظام بحيث يحتوي على مكونات احتياطية يمكنها التدخل في حال فشل أحد المكونات الأساسية لضمان استمرارية التشغيل.
- الصيانة التنبؤية: استخدام تقنيات الذكاء الاصطناعي والتعلم الآلي للتنبؤ بأي فشل محتمل في النظام استنادًا إلى البيانات التاريخية والبيانات التي يتم جمعها من المستشعرات أثناء تشغيل الروبوت.
4. استهلاك الطاقة وإدارة البطاريات
المشكلة
العديد من الروبوتات والأنظمة الميكاترونية تعتمد على البطاريات لتشغيلها، وخاصة الأنظمة المستقلة مثل الطائرات بدون طيار (Drones) والروبوتات المتنقلة. إدارة استهلاك الطاقة هي واحدة من أكبر التحديات في هذه الأنظمة، حيث أن البطاريات غالبًا ما تكون ذات سعة محدودة، ويؤدي استهلاك الطاقة العالي إلى تقليل وقت التشغيل الفعلي.
الحلول الممكنة
- تصميم فعال لاستهلاك الطاقة: التركيز على تصميم الأنظمة بحيث تكون مكونات الروبوت مستهلكة للطاقة بأقصى كفاءة. يمكن تحسين ذلك باستخدام محركات ذات كفاءة عالية، ومستشعرات منخفضة الطاقة، وتقنيات إدارة الطاقة المتقدمة.
- تقنيات إعادة الشحن الذاتي: العمل على تطوير روبوتات قادرة على إعادة شحن نفسها تلقائيًا عن طريق مصادر الطاقة المتجددة مثل الطاقة الشمسية أو حتى عن طريق الاعتماد على محطات شحن ذكية.
- تحسين سعة البطاريات: مواكبة الابتكارات في تكنولوجيا البطاريات مثل استخدام بطاريات الليثيوم الجديدة أو البطاريات الهجينة التي توفر سعة أكبر مع وزن أقل، مما يزيد من عمر البطارية وبالتالي وقت تشغيل الروبوت.
5. تحديات الذكاء الاصطناعي والتعلم الآلي
المشكلة
أصبحت الروبوتات تعتمد بشكل كبير على الذكاء الاصطناعي والتعلم الآلي لأداء المهام المعقدة مثل التعرف على الصور، التنقل في البيئات غير المألوفة، واتخاذ قرارات مستقلة. ومع ذلك، فإن تصميم وتدريب هذه الخوارزميات ليس أمرًا سهلاً ويتطلب بيانات ضخمة ووقتًا كبيرًا للتدريب.
الحلول الممكنة
- البيانات الجيدة: التركيز على جمع بيانات عالية الجودة ومناسبة لتدريب الخوارزميات. البيانات المتنوعة تساعد في تحسين أداء الخوارزميات في الظروف المتنوعة.
- التعلم المستمر: تطوير أنظمة قادرة على التعلم المستمر من البيانات الجديدة التي يتم جمعها أثناء التشغيل. هذه الأنظمة يمكنها تحسين أدائها بشكل مستمر استنادًا إلى التجربة الفعلية.
- التصميم المعياري: بناء الأنظمة بحيث تكون الخوارزميات والأنظمة الفرعية قابلة للاستبدال أو التعديل بسهولة في حال الحاجة لتحديث أو تحسين.
6. السلامة والأمان
المشكلة
مع تزايد استخدام الروبوتات في الأماكن العامة والصناعية والطبية، تبرز قضايا السلامة والأمان بشكل كبير. الأخطاء في البرمجيات أو فشل المعدات يمكن أن يؤدي إلى إصابات خطيرة. بالإضافة إلى ذلك، هناك مخاوف تتعلق بالأمان السيبراني للأنظمة الميكاترونية، حيث يمكن أن تكون عرضة للهجمات الإلكترونية.
الحلول الممكنة
- أنظمة الأمان المدمجة: دمج أنظمة أمان متعددة في التصميم، مثل مستشعرات الحركة وأنظمة الإيقاف التلقائي في حالات الطوارئ التي توقف النظام عند اكتشاف خطر وشيك.
- الاختبار الشامل: اختبار الأنظمة في بيئات محاكاة متعددة لاختبار قدرتها على الاستجابة لحالات الطوارئ وتقييم الأداء تحت ضغوط مختلفة.
- الأمان السيبراني: التركيز على تطوير أنظمة أمان سيبراني قوية تحمي الأنظمة الروبوتية من الهجمات الإلكترونية، بما في ذلك تقنيات التشفير وتحديثات الأمان المستمرة.
7. التحديات في تصنيع الروبوتات الصغيرة والدقيقة
المشكلة
تطوير الروبوتات الصغيرة والدقيقة مثل الروبوتات النانوية المستخدمة في التطبيقات الطبية يعتبر تحديًا كبيرًا. هذا النوع من الروبوتات يتطلب تقنيات تصنيع دقيقة جدًا، وصغر الحجم يؤدي إلى مشاكل تتعلق بدمج الطاقة والقدرة على التحكم.
الحلول الممكنة
- تقنيات تصنيع متقدمة: استخدام تقنيات التصنيع المتقدمة مثل الطباعة ثلاثية الأبعاد وتقنيات الليزر لتصنيع هذه الروبوتات بأقصى درجات الدقة.
- تحسين تقنيات التخزين المصغر للطاقة: العمل على تطوير تقنيات جديدة لتخزين الطاقة في الروبوتات الصغيرة باستخدام مواد متقدمة، مثل المواد النانوية التي يمكنها تخزين كمية كبيرة من الطاقة في حجم صغير.
- التحكم عن بعد: تطوير تقنيات للتحكم في هذه الروبوتات عن بعد باستخدام الحقول المغناطيسية أو الموجات فوق الصوتية، حيث لا يمكن تزويدها بمحركات تقليدية بسبب حجمها الصغير.
. تحديات الاستشعار والتعرف
المشكلة
التعرف على البيئة المحيطة بدقة هو أحد أهم التحديات التي تواجه الروبوتات في مجالات مثل التنقل الذاتي، التفاعل مع البشر، والعمل في بيئات غير منظمة. غالبًا ما يعتمد الروبوت على مجموعة من المستشعرات مثل الكاميرات، مستشعرات الليدار (LIDAR)، والمستشعرات الصوتية لجمع البيانات وتحليلها. لكن هذه المستشعرات قد تواجه تحديات في ظروف الإضاءة السيئة، البيئات المعقدة، أو حتى التعرف على الأشياء المتحركة بسرعة.
الحلول الممكنة
- دمج المستشعرات: من الحلول الفعّالة هو دمج عدة أنواع من المستشعرات في النظام لتحسين دقة البيانات المجمعة. على سبيل المثال، يمكن للكاميرات تقديم رؤية مفصلة بينما يتيح الليدار بيانات حول العمق والمسافات. عندما يتم دمج هذه البيانات مع بعضها البعض، يمكن تحسين التعرف على البيئة بشكل كبير.
- الذكاء الاصطناعي والتعلم العميق: استخدام تقنيات التعلم العميق لتحليل البيانات الواردة من المستشعرات. هذه التقنيات تمكن الروبوتات من تحسين قدرتها على التعرف على الأشياء والتكيف مع الظروف المختلفة. كما يمكن استخدام الشبكات العصبية العميقة لتحسين أداء الروبوت في التفاعل مع بيئته.
- تحسين دقة المستشعرات: الاستثمار في تطوير مستشعرات ذات دقة أعلى، قادرة على التعامل مع الظروف البيئية المختلفة مثل الإضاءة المنخفضة أو البيئات المتغيرة. قد يتطلب ذلك تصميم مستشعرات تعمل في نطاقات ضوئية مختلفة (مثل الأشعة تحت الحمراء) للتعامل مع تحديات الرؤية في ظروف معينة.
- المعالجة الحقيقية للوقت: تحسين قدرات معالجة البيانات في الزمن الحقيقي لتمكين الروبوت من التفاعل بسرعة مع التغيرات في البيئة المحيطة. تعتبر وحدات معالجة الرسومات (GPUs) والمسرعات المخصصة جزءاً مهماً من هذا الحل، حيث تساهم في تسريع معالجة البيانات من المستشعرات.
9. التحديات في البرمجيات والتحكم
المشكلة
تصميم أنظمة البرمجيات والتحكم الخاصة بالروبوتات معقد بشكل كبير، حيث يجب أن تتعامل هذه البرمجيات مع العديد من المستشعرات، المحركات، ونظم الاتصال مع ضمان السلامة والكفاءة العالية. يتطلب ذلك كتابة كود برمجي قادر على العمل في الوقت الحقيقي مع استجابة سريعة لأي تغيرات في البيئة. كما أن هناك صعوبة في ضمان توافق البرمجيات بين مكونات النظام المختلفة خاصة عند استخدام مكونات من شركات أو مزودين مختلفين.
الحلول الممكنة
- استخدام أطر العمل المفتوحة: أطر العمل مثل ROS (Robot Operating System) توفر بيئة مفتوحة ومتوافقة بين مختلف مكونات الروبوت. يمكن للمهندسين استخدام هذه الأطر لتطوير تطبيقات الروبوت وتسهيل التواصل بين مختلف مكونات النظام.
- التصميم المعياري: بناء النظام بشكل معياري يسمح بتطوير كل مكون على حدة واختباره قبل دمجه مع باقي الأجزاء. هذا يساعد في تقليل الأخطاء وتحسين الكفاءة عند تعديل أو استبدال أي مكون في النظام.
- التعلم من الأخطاء: يمكن استخدام أساليب اختبار البرمجيات وتحليل البيانات الناتجة عن الفشل لاكتشاف النقاط الضعيفة في البرمجيات وتحسينها. عمليات مثل الاختبار الوحدوي والاختبار التكاملي ضرورية لتحديد الأخطاء في مراحل مبكرة.
- نظم التحكم المتكاملة: الاعتماد على تصميمات برمجيات تحكم متعددة الطبقات التي يمكنها الفصل بين مستويات التحكم العليا (مثل التخطيط) ومستويات التحكم الدنيا (مثل التحكم في الحركة)، ما يساعد في التعامل مع تعقيد الأنظمة المتكاملة بكفاءة أكبر.
10. التحديات الاجتماعية والأخلاقية
المشكلة
مع تزايد استخدام الروبوتات في الحياة اليومية، تنشأ قضايا اجتماعية وأخلاقية تتعلق بكيفية التعامل مع الروبوتات ودورها في المجتمع. من أمثلة هذه القضايا، استبدال الروبوتات بالعمال البشر، وتأثير ذلك على العمالة. كما أن هناك مخاوف حول الخصوصية، خاصة في الأنظمة التي تعتمد على جمع بيانات حساسة مثل الروبوتات المنزلية.
الحلول الممكنة
- الإطار القانوني والتنظيمي: تطوير قوانين وتنظيمات واضحة تحكم استخدام الروبوتات وتحدد حدود تدخلها في حياة البشر. هذه القوانين يمكن أن تتناول قضايا الخصوصية، الاستخدام العادل، والمسؤولية عند وقوع أخطاء.
- التوعية والتعليم: زيادة الوعي العام حول فوائد الروبوتات ومخاطرها المحتملة. تنظيم حملات توعية وورش عمل تعليمية لتثقيف المجتمع حول أهمية التعاون بين البشر والروبوتات ودور التكنولوجيا في تحسين الحياة.
- التصميم الأخلاقي: يجب أن يضع مصممو الروبوتات القضايا الأخلاقية في الاعتبار عند تصميم الأنظمة. يجب أن يكون التركيز على تطوير روبوتات تتماشى مع المبادئ الأخلاقية وتعمل على تحسين حياة البشر بدلاً من استبدالهم.
- التفاعل البشري الآلي: تحسين قدرات الروبوتات على التفاعل بطرق تتسم بالاحترام والتفهم للمشاعر الإنسانية، ما يساهم في بناء علاقة إيجابية بين الإنسان والروبوت.
11. التحديات المالية والتكلفة
المشكلة
تطوير الروبوتات وأنظمة الميكاترونكس غالبًا ما يكون مكلفًا جدًا. هذا يشمل تكلفة البحث والتطوير، المواد، والبرمجيات بالإضافة إلى تكلفة التشغيل والصيانة. هذه التكاليف يمكن أن تكون عائقًا أمام تبني الشركات والمؤسسات الصغيرة لهذه التكنولوجيا.
الحلول الممكنة
- تقليل التكاليف عن طريق التصنيع المخصص: الاعتماد على تقنيات التصنيع المخصصة مثل الطباعة ثلاثية الأبعاد لتقليل تكاليف إنتاج الأجزاء الدقيقة والمعقدة. هذه التقنيات تتيح أيضًا تعديل الأجزاء بسهولة وتقليل الهدر.
- الاستثمار في البحث والتطوير الجماعي: العمل على تعزيز التعاون بين الجامعات والمراكز البحثية والشركات لتطوير تقنيات متقدمة يمكن أن تقلل من تكلفة الروبوتات. التعاون الدولي يمكن أن يساعد في مشاركة الموارد والأفكار وتطوير حلول جديدة أكثر كفاءة وأقل تكلفة.
- التصميم القابل للتوسع: تصميم الروبوتات وأنظمة الميكاترونكس بحيث يمكن تعديلها وتطويرها بسهولة لتلبي احتياجات المستقبل دون الحاجة إلى استثمارات كبيرة جديدة.
12. التحديات في الصيانة والدعم الفني
المشكلة
تتطلب الروبوتات الحديثة صيانة دورية لضمان استمرارية عملها بشكل موثوق. الصيانة يمكن أن تكون معقدة جدًا خاصة في الروبوتات التي تحتوي على عدد كبير من الأجزاء المتحركة والمستشعرات. بالإضافة إلى ذلك، قد يكون من الصعب العثور على فنيين ذوي الخبرة لصيانة وإصلاح هذه الأنظمة المتقدمة.
الحلول الممكنة
- الصيانة التنبؤية: استخدام تقنيات الذكاء الاصطناعي وتحليل البيانات للتنبؤ بأي أعطال محتملة قبل حدوثها. هذا يسمح بإجراء الصيانة الوقائية وتقليل وقت التوقف.
- التدريب المستمر للفنيين: يجب أن تركز الشركات على تدريب فنيي الصيانة بشكل دوري على أحدث التقنيات والأنظمة المستخدمة في الروبوتات. هذا سيساهم في تحسين جودة الصيانة وتقليل الحاجة إلى تدخلات خارجية.
- الروبوتات الذاتية الصيانة: تطوير روبوتات قادرة على تشخيص وحل بعض المشاكل الفنية بنفسها دون الحاجة إلى تدخل بشري. هذا يمكن أن يقلل من تكاليف الصيانة ويحسن من استمرارية العمل.
الخاتمة
هندسة الميكاترونكس والروبوتات هي مجال معقد ومتعدد التخصصات يواجه العديد من التحديات التقنية والاجتماعية والأخلاقية. لكن مع التقدم التكنولوجي السريع، هناك حلول مبتكرة ومتنوعة لمعالجة هذه التحديات وتحسين الأداء والكفاءة. سواء كانت التحديات تتعلق بالتكامل بين التخصصات المختلفة، استهلاك الطاقة، التحكم المعقد، أو الأمان والسلامة، فإن العمل الجماعي بين المهندسين والعلماء والمجتمع هو المفتاح لحل هذه المشكلات وفتح الباب أمام تطبيقات أوسع وأكثر فعالية للروبوتات وأنظمة الميكاترونكس في المستقبل.
ملخص
هناك عدة مشاكل شائعة في هندسة الميكاترونكس والروبوت. ومن بين هذه المشاكل:
1. مشكلات التصميم: قد تواجه صعوبة في تحقيق التناغم بين الأجزاء الميكانيكية والكهربائية والبرمجية للجهاز. يمكن حل هذه المشكلة من خلال التخطيط المبدئي الجيد والتعاون بين متخصصين في المجالات المختلفة.
2. مشكلات البرمجة: قد تواجه صعوبة في برمجة الروبوت أو تحديث البرمجيات الخاصة به. يمكن حل هذه المشكلة من خلال إكتساب مهارات البرمجة المناسبة والاستفادة من المصادر المتاحة عبر الإنترنت والتواصل مع مجتمع المطورين للحصول على المساعدة.
3. مشكلات الاستشعار والتحكم: قد تواجه صعوبة في تطبيق التحكم الدقيق واستشعار البيئة بشكل صحيح. يمكن حل هذه المشكلة من خلال اختيار الاستشعار المناسب وتطوير نظام التحكم المناسب للتعامل مع البيانات المستشعرة.
4. مشكلات التوافق والتكامل: قد تواجه صعوبة في توافق الأجزاء المختلفة في الجهاز وتكاملها بشكل سلس. يمكن حل هذه المشكلة من خلال اختبار الأجزاء المختلفة معًا وضمان توافقها وتكاملها قبل التطبيق الفعلي.
لاحظ أن هذه المشاكل ليست شاملة، وقد تواجه تحديات أخرى حسب المشروع الخاص بك. الحل الأساسي لجميع هذه المشاكل هو الاستعانة بالمهارات الفنية المناسبة والتعاون مع فريق متخصص.



