
- مواصفات الأداء
- المكونات الفضائية والأجهزة
- المركبة الفضائية
- الحجم العام للمركبة الفضائية
- الاتصالات
- الهيكل الرئيسي للمركبة الفضائية
- التحكم الحراري
- البطارية
- أدوات الحمولة
- الإلكترونيات
- النظام الكهربائي
- نظام التحكم في الموضع والزوايا
- حالة المهمة
- LISS-4 (Linear Imaging Self-Scanning Sensor-4)
- LISS-3 (جهاز تصوير ذاتي الفحص الخطي-3)
- AWiFS (المستشعر المتقدم ذو الحقل العريض)
- القطاع الأرضي
قمر الاستشعار عن بُعد IRS-P6، المعروف أيضًا باسم “ResourceSat-1″، يمثل إنجازًا فضائيًا مهمًا للهند، حيث تم إطلاقه في 17 أكتوبر 2003، باستخدام صاروخ PSLV C5 من مركز ساتيش دهاوان للفضاء. يتبع هذا القمر الصناعي الجديد في سجل الأمم المتحدة تحت اسم “IRS-P6″، وهو يخدم أغراض المراقبة البيئية والزراعية بواسطة الهند.


المميزات التقنية لهذا القمر الصناعي تكشف عن تصميم فعّال ومتقدم، حيث ينتمي إلى فئة المدار الأرضي المنخفض (LEO)، مع نوع مدار متزامن مع الشمس (Sun-Synchronous). يصل ارتفاع القمر الصناعي إلى نقطة الأوج البالغة 823 كيلومترًا، بينما يبلغ الحضيض 817 كيلومترًا، مما يمنحه ميزة دقة المشاهدة والتقاط الصور البصرية بفضل انخراطه في فترة مدارية تبلغ 101.3 دقيقة.
تتيح قدرة الطاقة البالغة 1200 واط لهذا القمر الصناعي استمرارية عمله بكفاءة عالية، وهو ما يعكس التكنولوجيا المتقدمة المستخدمة في تصميمه. ورغم العمر المتوقع البالغ 5 سنوات، يعكس هذا القمر الصناعي استمرارية الهند في مجال استكشاف ورصد الموارد الطبيعية على سطح الأرض.
تمثل المهمة الرئيسية لهذا القمر الصناعي استشعار الأرض، حيث يُستخدم لرصد الموارد الزراعية والأراضي والمياه بدقة عالية، وهو يشكل جزءًا أساسيًا من الجهود الهندية لتحسين إدارة الموارد وتحديد احتياجات الزراعة ومتابعة البيئة بشكل شامل.
يتواجد هذا القمر الصناعي في المدار بزاوية انحراف تبلغ 98.8 درجة، مما يساعد في توفير تغطية كاملة لسطح الأرض. وبفضل تقنيات التصوير البصري المتقدمة المستخدمة في المهمة، يمكن للهند مراقبة التغيرات البيئية والزراعية بدقة فائقة.
يتميز هذا القمر الصناعي بقدرته على متابعة الموارد الطبيعية والزراعية بشكل دوري ومنتظم، مما يسهم في تقديم بيانات دقيقة ومفيدة للحكومة الهندية والمستخدمين الآخرين. ومع ارتباطه بالهند ومركز الفضاء الهندي (ISRO)، يعكس هذا القمر الصناعي التزام الهند بتحسين التكنولوجيا الفضائية واستخدامها في مجالات البحث والتطبيقات العملية.
من الواضح أن القمر الصناعي للمراقبة عن بُعد الهندي P6 (IRS-P6)، المعروف الآن باسم ResourceSat-1، كان قمرًا بصريًا يعمل بنظام الصورة تم تشغيله من قبل الهيئة الهندية للأبحاث الفضائية (ISRO). وكان كذلك آخر قمر في سلسلة القمر الصناعي IRS، حيث كان يراقب الموارد الطبيعية والبيئات في الهند منذ إطلاقه في أكتوبر 2003 حتى انتهاء تشغيله في عام 2013.
وهنا بعض الحقائق السريعة حول هذا القمر الصناعي:
- نوع المهمة: مراقبة عن بعد الأرض (EO)
- الجهة المشرفة: ISRO
- حالة المهمة: مكتملة
- تاريخ الإطلاق: 17 أكتوبر 2003
- تاريخ نهاية الخدمة: 7 ديسمبر 2013
- مجال القياس: الأرض، الثلوج والجليد
- فئة القياس: صور متعددة الاستخدامات (للأرض)، النباتات، الألبيدو والانعكاس، تضاريس المناظر الطبيعية، تغطية جليد البحر وحافته وسماكته، تغطية الثلوج وحافتها وعمقها
- القياسات التفصيلية: صور سطح الأرض، أنواع النباتات، ألبيدو سطح الأرض، تضاريس سطح الأرض، تغطية الثلوج، نسبة الامتصاص للضوء الشمسي المرئي (FAPAR)، تغطية الأنهار الجليدية
- الأدوات: LISS-III (Resourcesat)، AWiFS، LISS-IV
- نوع الأداة: معاينات متعددة الطيف (مرئية / مؤشر حراري)، مصورات بصرية عالية الدقة
يُظهر هذا القمر الصناعي كيف تعمل التكنولوجيا الفضائية على مراقبة وفهم الموارد الطبيعية وتغيرات البيئة على سطح الأرض، وهو جزء مهم من الجهود العلمية والتكنولوجية التي تقوم بها الهند في مجال الفضاء والبيئة.
القمر الصناعي ResourceSat-1 كان يحمل جهاز Advanced Wide Field Sensor (AWiFS) وهو نوع من معاينات متعددة الطيف، بالإضافة إلى كاميرات متعددة الطيف بدقة متوسطة وعالية: Linear Imaging Self-Scanning Sensor-3 (LISS-3) و Linear Imaging Self-Scanning Sensor-4 (LISS-4). وكانت جميع بيانات الأدوات تُستخدم لدراسة عوائد المحاصيل الزراعية، ومراقبة الآفات/الأمراض، وإدارة الكوارث، بالإضافة إلى إدارة الموارد الأرضية والمائية.
مواصفات الأداء
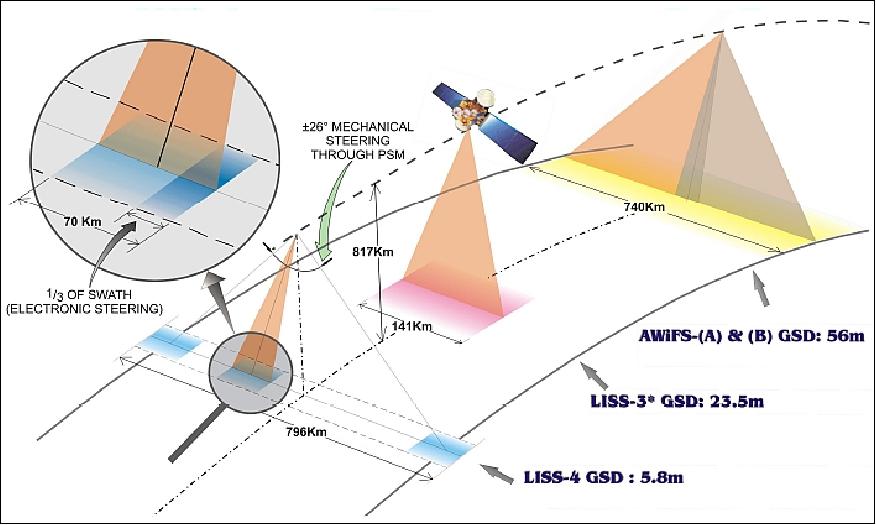
- AWiFS كان له عرض ممر بقدر 740 كم مع دقة فضائية تتراوح بين 56 – 70 م (حافة الممر في النادير) وكان يراقب في أربعة نطاقات طيفية: الأخضر، الأحمر، الأشعة تحت الحمراء القريبة (NIR)، والأشعة تحت الحمراء القصيرة الموجة (SWIR).
- LISS-3 كان يراقب أيضًا في أربعة نطاقات (الأخضر، الأحمر، NIR، وSWIR) لكن بعرض ممر يبلغ 141 كم ودقة 23.5 م.
- كما تميز LISS-4 بوضع متعدد الطيف ووضع مونو اللذين يُلتقطان في ثلاثة نطاقات (الأخضر، الأحمر، وNIR) بدقة 5.8 م، وعرض ممر 23.9 كم و70 كم على التوالي.
كان لدى ResourceSat-1 مدار متزامن مع الشمس بارتفاع يبلغ 817 كم وزاوية ميل تبلغ 98.7 درجة. كان لديه فترة بلغت 101.35 دقيقة ودورة تكرار كل 24 يومًا.
المكونات الفضائية والأجهزة
- كانت الاتصالات بيانات التليمترية والتتبع والتحكم (TT&C) تُنقل عبر ترددات الراديو S-band بمعدل نقل أسفل يتراوح بين 1-16 كيلوبت/ث ومعدل نقل أعلى يبلغ 100 بت/ث.
- كانت بيانات الحمولة تُنقل في النطاق الأشعة X بمعدل نقل يصل إلى 105 ميجابت/ث.
مهمة ResourceSat-1، المعروف سابقًا بإسم IRS-P6 (Indian Remote-Sensing Satellite-P6)
نظرة عامة، مركبة فضائية، إطلاق، حالة المهمة، مجموعة أجهزة الاستشعار، قطاع الأرض، المراجع
تُعتبر مهمة IRS-P6 مهمة مراقبة الأرض ضمن سلسلة IRS (Indian Remote-Sensing Satellite) التابعة لـ ISRO (Indian Space Research Organization)، بنغالور، الهند. تهدف المهمات العامة لمهمة IRS-P6 (ResourceSat-1) إلى تقديم خدمات استشعار عن بُعد مستمرة على أساس تشغيلي لإدارة الموارد المتكاملة للأرض والمياه. يعتبر IRS-P6 استمرارًا لمهمات IRS-1C/1D مع قدرات محسّنة بشكل كبير.
قبل الإطلاق، قامت ISRO بتغيير اسم المركبة IRS-P6 إلى ResourceSat-1، لوصف نطاق تطبيق بيانات المراقبة الخاصة بها بشكل أكثر ملائمًا.
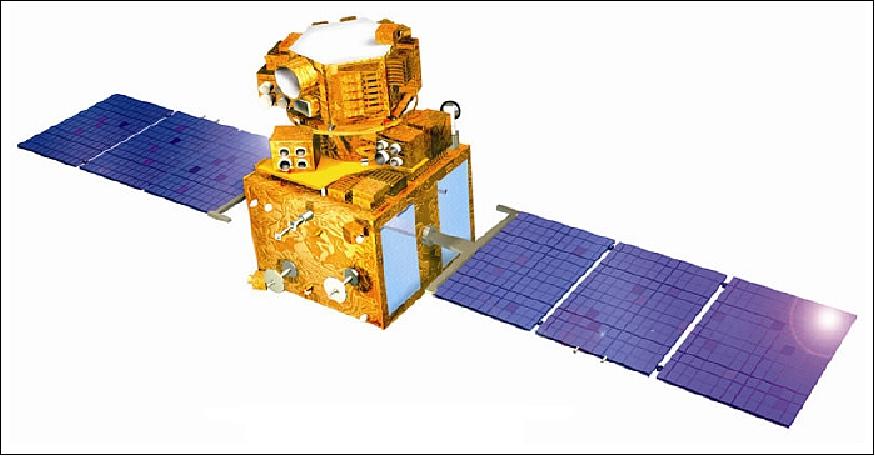
المركبة الفضائية
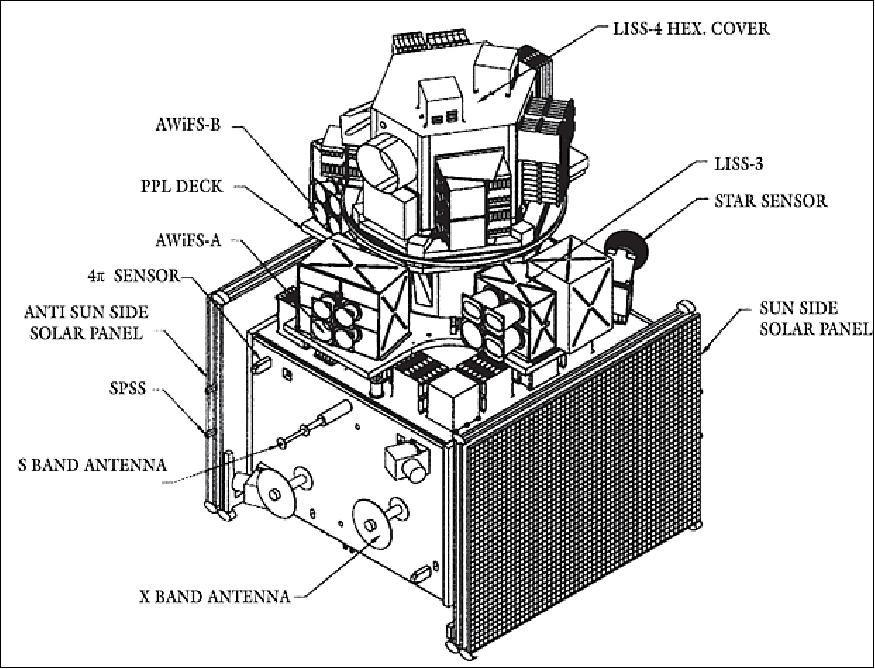
تتميز الهيكل الرئيسي للمركبة الفضائية بتراث IRS-1C/1D -P3 (المبني من قبل ISRO/ISAC في بنغالور). يتكون هيكل المركبة الفضائية من وحدتين، النظام الرئيسي ووحدة الحمولة. يتم بناء النظام الرئيسي حول أسطوانة مركزية تحمل الحمولة بقطر 915 ملم ويتألف من أربعة ألواح عمودية واثنين من الأرضيات الأفقية. يتم توصيل قاعدة الأسطوانة بحلقة واجهة تتوافق مع مركب الإطلاق. تحمل الألواح العمودية والأرضيات الأفقية مجموعات متنوعة من الأنظمة الفرعية. يتم تركيب أجهزة استشعار متنوعة للاتجاهات ونظام تحديد المواقع الفضائي (SPS) وهوائيات نقل البيانات على الأسطح الخارجية للألواح والأرضية السفلية. تم تركيب متتبع نجومي على الأرضية العلوية بتوجيه مائل. تتكون وحدة الحمولة من نظام مزدوج المستويات، حيث تستوعب الأرضية العليا لوحدة الحمولة موديلات الكاميرا LISS-3، AWIFS-A و AWIFS-B.
تم تركيب كاميرا LISS-4 على أرضية دوارة مرتبطة بمحرك التوجيه للحمولة (PSM) الذي يمكنه التدوير بزاوية ± 26 درجة. يتم توصيل تجميعة وحدة الحمولة بأسطوانة CFRP من نوع القشرة الواحدة، والتي بدورها ترتبط بأسطوانة النظام الرئيسي من خلال تجميعة دعامة لنقل الحمولة بكفاءة.
الحجم العام للمركبة الفضائية
يبلغ حوالي 2 متر في القطر و2.1 متر في الارتفاع. وزن المركبة الفضائية الإجمالي عند الإطلاق هو 1360 كجم، بما في ذلك الوقود لخمس سنوات من التشغيل. يتم توفير الطاقة من خلال مجموعة شمسية تولد 1250 وات (عند نهاية العمر الافتراضي)، حيث تتحرك المجموعة الشمسية تلقائيًا باتجاه الشمس؛ بالإضافة إلى بطاريات NiCD بسعة 24 آه لكل منها.
المنصة مستقرة بثلاثة محاور [متتبع نجومي في حلقة، عجلات ردود الفعل بالمغناطيس، نظام التحكم في الردود بـ 12 فوهة، 8 فوهات بمحركات بقوة 1 نيوتن، 4 فوهات بمحركات بقوة 11 نيوتن]، ودقة الاستقرار هي ±0.15 درجة، والاستقرار هو 3 x 10-4 درجة/ث. يوفر مسجل حالة الصلب (SSR) الذي يحمل الحالة 120 جيجابت من السعة لتخزين بيانات LISS-4 لمدة حوالي 20 دقيقة. عمر تصميم المركبة الفضائية هو 5 سنوات.
الاتصالات
الاتصالات بالراديو: اتصالات TT&C في نطاق S-band بمعدلات نقل بيانات أسفل من 1-16 كيلوبت/ث؛ التحريج: PCM/PSK/PM. معدل نقل البيانات الأعلى هو 100 بت/ث. يقوم جهاز النقل TT&C بإرسال بيانات التليمتريا، ويستقبل إشارات التليمد، ويفك تحريج الترددات، ويعيد بثها إلى الأرض بنسبة دوران ثابتة تبلغ 240/221 للقياس ذو الاتجاهين (قياس دوبلر). تردد الارسال: 2071.875 ميجاهرتز، تردد الاستقبال: 2250 ميجاهرتز. يتم نقل بيانات الحمولة عبر النطاق الأشعة X بمعدل نقل يصل إلى 105 ميجابت/ث. يتكون نظام الاتصالات BDH (معالجة البيانات الأساسية) من سلسلتين منفصلتين، إحداهما لبيانات LISS-3 و AWiFS، والسلسلة الثانية لبيانات LISS-4. يتم نقل بيانات LISS-4 على الناقل-1 بتردد 8125 ميجاهرتز ويتم نقل بيانات LISS-3 + AWiFS على الناقل-2 بتردد 8300 ميجاهرتز.
تم إطلاق القمر الصناعي IRS-P6 في 17 أكتوبر 2003 باستخدام صاروخ PSLV من مركز ساتيش دهاوان للفضاء في سريهاريكوتا، الهند.
المدار: المدار المتزامن مع الشمس، ارتفاع = 817 كم، ميل = 98.69 درجة، فترة = 101.35 دقيقة، ووقت عبور خط الاستواء المحلي في الساعة 10:30 صباحًا بتوقيت LTDN (الوقت المحلي في النقطة الهبوطية). يتم الحفاظ على مسار المركبة الفضائية ضمن ± 1 كم.
تم تقدير المدار الذي حققته IRS-P6 بـ 815.417 كم × 831.668 كم مع ميل يبلغ 98.805 درجة. تم تحقيق المدار المستهدف من خلال أداء ثلاث عمليات تداول في المستوى وخمس عمليات مدمجة (في المستوى وخارج المستوى). تم إجراء مجموعة من ثماني عمليات اكتساب للمدار، بدءًا من 20 أكتوبر إلى 29 نوفمبر 2003 للحصول على مدارات “مقفلة” و “مجمدة” للبيريجي. تم تثبيت مسار الحلقة في 29 نوفمبر 2003.
الهيكل الرئيسي للمركبة الفضائية
- هيكل الألمنيوم وعناصر CFRP للمنصة الرئيسية ووحدات الحمولة
- وزن المركبة الفضائية: 1360 كجم
التحكم الحراري
- عناصر سلبية وشبه نشطة ونشطة مثل مرايا الشمس البصرية، والعزل المتعدد الطبقات، وأنابيب الحرارة، وأجهزة التسخين بالشرائط/الفويل الحراري.
البطارية
- بطاريتان NiCd بسعة 24 آه لكل منهما.
أدوات الحمولة
- تشمل الكاميرات LISS-3 و AWIFS-A و AWIFS-B.
الإلكترونيات
- تعمل بنطاق درجات الحرارة من 5ºC ± 5ºC إلى 20ºC ±3ºC و 0-40ºC.
النظام الكهربائي
- مجموعة شمسية تتألف من 6 ألواح شمسية (1.4 × 1.8 م2 لكل واحدة) تولد 1250 واط من الطاقة عند نهاية العمر الافتراضي.
- محولات DC-DC متنوعة للباصات الخام (28 إلى 42 فولت).
نظام التحكم في الموضع والزوايا
- يشمل مجموعة من الأجهزة مثل مستشعرات الأرض، ومستشعرات الشمس الرقمية، ومتتبعي النجوم، ومستشعرات الشمس بزاوية 4π، وأجهزة الدوران.
- دقة التوجيه: ≤ 0.05 درجة (3σ)، ومعدل التحول: ≤ 5 × 10-5 درجة/ث (3σ).

حالة المهمة
• ديسمبر 2015: وفقًا لتقرير ISRO Country Report to APRSF 2015، فإن المركبة الفضائية ResourceSat-1 ما زالت تعمل بشكل جيد. – يعاني جهاز LISS-4 من قلة القدرة منذ عام 2012.
• تم إطلاق ResourceSat-1 في 17 أكتوبر 2003 وما زالت تقدم خدمات بيانات الاستشعار عن بُعد في أكتوبر 2014 (11 سنة على المدار).
• في عام 2012، كانت المركبة الفضائية ResourceSat-1 (المعروفة أيضًا باسم IRS-P6) تعمل بقدرات مخفضة. المركبة الفضائية ResourceSat-1 في العام التاسع من عملياتها. تعمل حمولات LISS-3 و AWiFS بشكل روتيني.
• في فبراير 2011، كانت المركبة الفضائية IRS-P6 وحمولتها تعمل بشكل طبيعي (في العام الثامن على المدار).
• المركبة الفضائية IRS-P6 وحمولتها تعمل بشكل طبيعي في عامي 2010 و 2008 و 2009.
• في عام 2007، تم إجراء عمليات معايرة متقاطعة لأجهزة المركبة الفضائية IRS-P6 (AWiFS، LISS-3) مع أجهزة ETM+ من Landsat-7، TM من Landsat-5، و HRCCD من CBERS-2.
تتضمن حمولة المركبة الفضائية ResourceSat-1 ثلاثة أجهزة:
• جهاز تصوير ذاتي الفحص عالي الدقة (LISS-IV): يستخدم هذا الجهاز ماسحًا خطيًا لتوليد صور عالية الدقة، ويعتمد على مجموعات خطية من أجهزة CCD (أجهزة الشحن المقروءة بالتشابك).
• جهاز تصوير ذاتي الفحص بدقة متوسطة (LISS-III): يستخدم هذا الجهاز ماسحًا خطيًا لتوليد صور بدقة متوسطة، ويعتمد أيضًا على مجموعات خطية من أجهزة CCD.
• جهاز AwiFS (المستشعر المتقدم ذو الحقل العريض): يستخدم هذا الجهاز مجموعات خطية من أجهزة CCD لإنتاج صور عريضة الحقل، وهو مجهز بتقنية ماسحة خطية.

LISS-4 (Linear Imaging Self-Scanning Sensor-4)
الكاميرا متعددة الطيف وعالية الدقة LISS-4 هي الجهاز الرئيسي في هذه الحمولة الحساسة. تعتبر LISS-4 كاميرا تقوم بمسح الخطوط الثلاثية من سلف LISS-3 (نفس النطاقات الطيفية VNIR كـ LISS-3) بدقة فضائية تبلغ 5.8 متر وعرض مسح يبلغ 70 كم. يمكن تشغيل LISS-4 في أي من وضعين دعم:
- وضع متعدد الطيف (MS): يتم جمع البيانات في 3 نطاقات تتوافق مع 4096 بكسل متجاورة محددة مسبقًا مع عرض مسح يبلغ 23.9 كم (يمكن تحديده داخل مجموع العرض الإجمالي 70 كم). يمكن تحديد الشريط المكتشف 4k في أي مكان داخل 12k بكسل عن طريق تحديد رقم البكسل البدء باستخدام خطة المسح الإلكتروني.
- وضع واحد النطاق (Mono): يمكن نقل بيانات البكسل الكاملة 12k من أي نطاق واحد محدد، مما يتوافق مع عرض مسح 70 كم. بشكل عام، يتم مراقبة ونقل بيانات النطاق 3 (B3) في هذا الوضع.
تتميز LISS-4 بإمكانية توجيه متناوب ±26 درجة في الاتجاه المستقيم العرضي، مما يسمح بدورة زيارة تبلغ 5 أيام. الوحدة الكهروضوئية لـ LISS-4 متطابقة تمامًا مع كاميرا PAN لمركبات IRS-1C/1D. يتضمن مصفوفة CCD 12,288 عنصر لكل نطاق. يبلغ وزن الجهاز 169.5 كجم، والقدرة 216 واط، ومعدل البيانات 105 ميجابت/ث. يتم تنظيم تحكم درجة حرارة المكتشف
باستخدام لوحة مشعة مقترنة بكل CCD من خلال أنابيب الحرارة وشرائط النحاس.
تم تنفيذ كاميرا LISS-4 باستخدام بصريات تلسكوب ثلاثة مرايا عاكسة (نفس ذلك في كاميرا PAN للمركبات IRS-1C/1D) ومصفوفة CCDs خطية تحتوي على 12,288 بكسل، حيث يبلغ حجم كل بكسل 7 ميكرومتر × 7 ميكرومتر. يتم وضع ثلاثة CCDs من هذا النوع في المستوى البؤري للتلسكوب مع مرشحات النطاق الطيفي الفردية الخاصة بها. يتم استخدام ترتيب بصري يتضمن مثلث متساوي الأضلاع لتقسيم الشعاع إلى ثلاثة حقول تصوير تُفصل في اتجاه الطريق. تترجم هذه الفصل على الأرض إلى مسافة تبلغ 14.2 كم بين خطوط الصور B2 و B4. في حين أن B3 تنظر إلى الأسفل (ندر)، تنظر B2 إلى الأمام وتنظر B4 إلى الخلف في اتجاه الاتجاه الحركي. نوع المكتشف: THX31543A من Thomson.
معايرة LISS-4: تم تنفيذ نظام معايرة في الطيران باستخدام LED (مصابيح ثنائية الفينيل)، حيث يتم وضع ثمانية LED أمام CCD (دون عرقلة مسار الضوء أثناء التصوير). يتم تشغيل هذه الLEDs بتيار ثابت ويتم تغيير وقت الاندماج للحصول على 16 مستوى تعريض، يغطي نطاق الديناميكية بطريقة تتسلسلية. يتكرر هذا التسلسل بشكل دوري.

LISS-3 (جهاز تصوير ذاتي الفحص الخطي-3)
تعتبر LISS-3 كاميرا متعددة الطيف وذات دقة متوسطة. الجهاز الماسح للخطوط متطابق مع LISS-3 في مركبات IRS-1C/1D (بالنسبة لوحدات العدسات والمكتشفات والإلكترونيات) في النطاقات الثلاثة VNIR، حيث تبلغ دقته الفضائية 23.5 متر لكل منها. تم تعديل دقة النطاق SWIR لتصبح 23.5 متر أيضًا في عرض مسح يبلغ 140 كم. تم تعديل تصميم البصريات والمكتشف للنطاق SWIR لتناسب الدقة المطلوبة؛ حيث يستخدم النطاق B5 مكتشف CCD بعناصر 6,000 عنصر مصنوع من الأرسينيد المصبوب بالجاليوم والإنديوم بحجم بكسل 13 ميكرومتر. يعتبر CCD SWIR جهازًا جديدًا يستخدم تقنية قراءة CMOS لكل بكسل، مما يحسن أداء الضوضاء. تحتوي مصفوفة CCD VNIR على 6,000 عنصر لكل نطاق. يبلغ وزن الجهاز 106.1 كجم، واستهلاك الطاقة 70 واط، ومعدل البيانات 52.5 ميجابت/ث.
تُنفذ عملية المعايرة في الطيران لكاميرا LISS-3 باستخدام 4 LED لكل CCD في النطاقات VNIR و 6 LED للنطاق SWIR. تعمل هذه الـ LEDs في وضع النبضات ويتم تغيير مدة النبضة التي تكون فيها هذه الـ LEDs قيد التشغيل بخطوات محددة. كل LED يحتوي على عدسة أسطوانية لتوزيع كثافة الضوء على CCD. يتكون كل دورة معايرة من 2048 خطًا توفر ستة مستويات تعريض غير صفرية.
AWiFS (المستشعر المتقدم ذو الحقل العريض)
تعتبر AWiFS كاميرا ذات دقة متوسطة ذات زاوية واسعة (56 متر) مع عرض مسح يبلغ 740 كم (FOV=±25º) وهي من سلف WiFS. يعمل الجهاز الماسح للخطوط في ثلاثة نطاقات طيفية تطابق نطاقين VNIR (0.62 – 0.68 ميكرومتر، 0.77 – 0.86 ميكرومتر) ونطاق SWIR (1.55-1.70 ميكرومتر) من كاميرا LISS-3. تم تنفيذ كاميرا AWiFS باستخدام وحدتي بصرية وكهروضوئية منفصلتين مائلتين بزاوية 11.94 درجة بالنسبة إلى الندر. تغطي كل وحدة مسح عرضًا يبلغ 370 كم توفر عرض مسح مجتمع يبلغ 740 كم مع تراكب جانبي بينهما. تمكن تغطية العرض الواسعة AWiFS من توفير قدرة تكرار كل خمسة أيام. تحتوي الوحدات البصرية والكهروضوئية على بصريات تصوير انكسارية بالإضافة إلى مرشح تداخل النطاق ومرشح كثافة محايدة ومكتشف CCD ذي مصفوفة خطية من 6000 بكسل لكل نطاق طيفي.
تم تنفيذ عملية المعايرة في الطيران باستخدام 6 LEDs أمام كل CCD. للنطاقات VNIR (B2، B3، B4)، تتم المعايرة بتسلسل متزايد تدريجيًا من 16 مستوى كثافة ضوء من خلال التحكم في الاندماج. بالنسبة للنطاق SWIR، يكون التسلسل المعاير مماثلًا لتلك التي توجد في LISS-3 من خلال دورة متكررة من 2048 خط مسح.
القطاع الأرضي
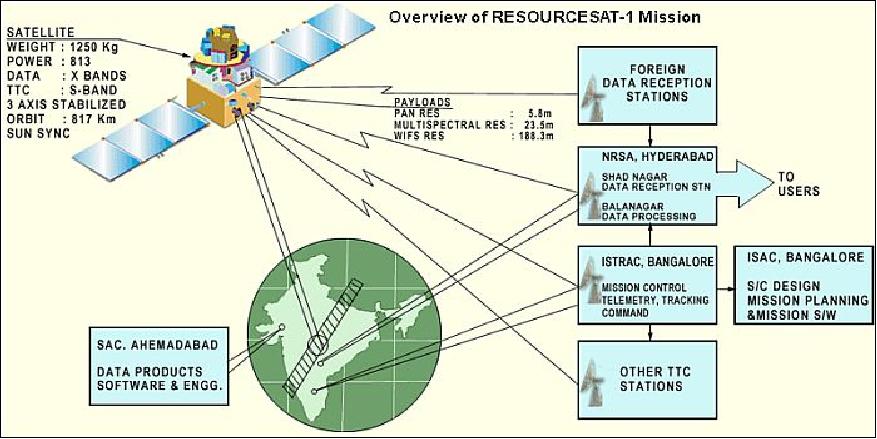
تتم مهام الاتصال والتتبع والتحكم (TT&C) عن طريق ISTRAC (مركز إسرو لتتبع البيانات والأوامر بالراديو) مع محطات أرضية تقع في بنغالور ولكناو وموريشيوس؛ بالإضافة إلى الدعم الانتقائي من وكالات الفضاء في أوروبا وروسيا وأمريكا. في الهند، تُقدم وكالة NRSA (الوكالة الوطنية للمسح البعيد) الواقعة في شادناجار بالقرب من حيدر أباد، الهند، وظائف استقبال بيانات الحمولة وتخزينها ونشرها/معالجتها وتوزيعها. في ألمانيا، توفر شركة Euromap GmbH في نيوستريليتس استقبال البيانات وهي موزع تجاري لمنتجات بيانات IRS-P6.
يمكن اكتساب بيانات ResourceSat-1 من أي محطة أرضية تملك قدرة استقبال النطاق X – باستخدام الأجهزة والبرمجيات الإطارية المتخصصة التي تم ترخيصها من قبل ISRO/Antrix. تمرخص شركة Antrix Corporation، وهي ذراع التسويق التابعة لـ ISRO، بتسويق واكتساب بيانات ResourceSat-1 على مستوى العالم إلى Space Imaging في ثورنتون، كولورادو، الولايات المتحدة. – عند تشكيل الشركة الجديدة GeoEye في يناير 2006 (حيث اشترت OrbImage شركة Space Imaging وشكلت شركة واحدة تدعى GeoEye)، أصبحت GeoEye الموزع الرئيسي لبيانات ResourceSat-1.
يتم تشغيل IRS-P6 من قبل ISTRAC (شبكة تتبع إسرو) في بنغالور. تُقدم NRSA الوظائف المتعلقة بتقديم ومعالجة البيانات وتخزينها في حيدر أباد، الهند. كما توفر ISTRAC تتبع القمر الصناعي.